





【猎云网(微信:ilieyun )北京】10月28日报道
)北京】10月28日报道
10月28日,在2020联想创新科技大会上,联想发布首款自研工业机器人——晨星工业机器人。
晨星机器人具备自主模式和人机协同模式,自主模式下机器人可以智能行动、智能建图,无需人的控制而移动。采用3D物体识别,用于引导机器人上的机械臂执行任务,同时,路径规划也实现自主,能够实现避障功能。
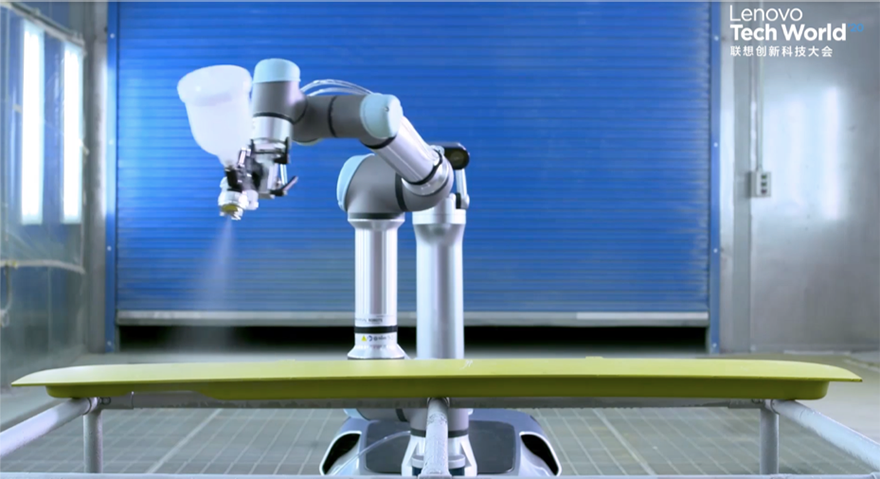
据悉,晨星工业机器人为国产大飞机的制造而工作。飞机需要喷漆的零件高达数百种,在传统自动化喷涂实践中,机械臂的示教和调试要花费几周的时间;但如果采用人工喷漆,质量会依赖于工人的操作手法,也很难保证一致性。而晨星工业机器人就是解决上面难题的。联想研究院的研发专家透露,晨星工业机器人的研发需求和任务极其紧急,从商飞需求的提出到联想最终将产品成型,一年时间日夜兼程。
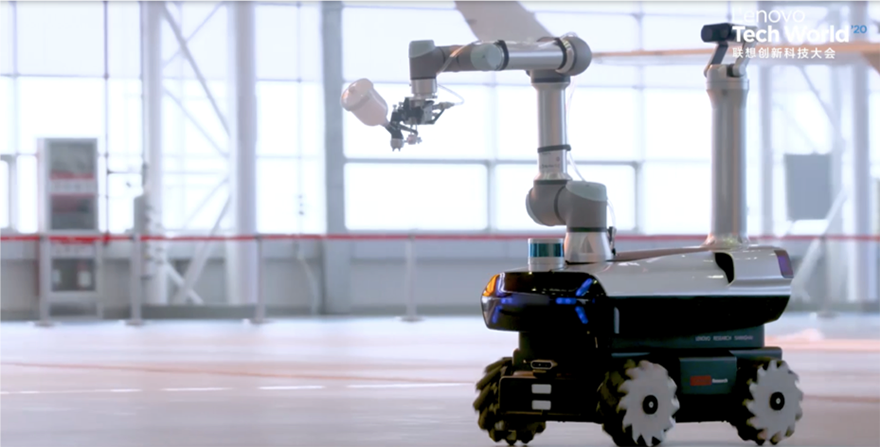
联想晨星机器人
联想集团高级副总裁、CTO芮勇博士介绍称“首先,机器人会对整个车间进行空间扫描感知,数据在边缘侧的虚拟机上实时三维建图和渲染,并通过容器化的SLAM技术,导航定位,移动至指定的喷漆间。机器人的双目立体相机将操作台的工件和周边情况实时采集到边缘服务器。边缘服务器随后将3D视频流实时推送到AR眼镜。而工人通过AR眼镜和手柄远程操纵机器人同步执行喷漆,手感完全等同于亲临现场。这样操作一次自然示教之后,该零部件的喷漆能力就保存在了边缘侧,之后对于同样规格的零部件,机器人就能实现自主喷涂。此外,机器人还能进行基于计算机视觉的喷涂质量自动检测。”
联想打造的晨星工业机器人,在强大的边缘算力和智能支持下,能让工人通过机器人精准地执行远程喷漆工作。
晨星机器人是什么?
联想晨星机器人是一个能够帮助用户立体感知远程环境,并且与之实时交互的机器人系统。大量的前沿技术使得该机器人系统具备远程呈现,远程控制以及示范学习(3T)的能力。
系统的整体架构为:机器人位于远程工作空间内,将其拍摄的3D视频流通过5G网络发送至用户,同时接收来自用户的控制指令;用户位于操作区通过头戴AR设备立体感知环境,并基于当前感知信息向机器人下达控制指令。
具体来说,基于5G端-端的数据传输架构确保机器人端双目立体视频数据回传的实时性,摄像头视角实时跟随用户视角,结合增强现实技术使得用户能够身临其境地实时感知动态远程环境;自主研发的高级机器人控制算法响应速度快,鲁棒性好,利用5G传输控制指令的快速性,保证远程环境中的机器人以极低的延迟顺滑地复现用户发出的动作指令,进而保证机器人精确地在远程环境中作业。
用户头戴AR设备进行立体感知,AR设备感知用户头部位姿变化用于控制机械臂,手持设备用于控制机器人的末端执行机构,且机器人系统带有碰撞检测,保证作业过程中的安全性。
除此之外,该机器人系统还能够完成基本的示教任务,即用户引导机器人进行一次作业任务,机器人即可学会动作序列,最终在没有用户介入的情况下自主完成该作业任务。同时,该系统具备柔性作业能力,能够在工厂中完成多种类型的作业。
拥有“手”“脚”和“大脑”
今年,联想晨星系列在视觉进步的基础上,运用了原本就日趋成熟的晨星AR设备和晨星CV模组,而且为设备加上了“手”“脚”和“大脑”,打造了联想晨星机器人。
“手”就是晨星机械臂,它能够学习和模拟工人操作的手臂动作和角度,联想大大地提高了机械臂与工人手臂的同步效率。
“脚”就是机器人的可移动性,通过5G和边缘计算,能够帮助晨星机器人更自由地在车间等不同的应用场景中移动。晨星机器人的安全性也很强,在车间中遇到障碍或工人时,会主动停止移动。
“大脑”就是机器人通过人工智能,能够学习工人的操作,从而在未来加工同一工件时准确复制之前的操作路径,这极大地增强了车间生产和加工质量的稳定性、一致性。
联想深度运用了自身的混合轻量级虚拟化引擎和模拟优化技术上的优势,从端插项目开始于中国商飞进行合作,再到航电检测项目、AR装配项目、人机协同的喷漆系统项目等等。
联想晨星机器人非常适合代替人工在流水线、工作空间受限、危险、辐射等环境中作业,大大降低人工作业风险,典型应用场景如装配流水线,喷涂车间,电力巡检作业,核电站中进行放射性试验或操作的热室,核废料搬运、处理,高温高压的工作环境等。



