文|曹婷婷
编辑|在洲
时隔半年,再次见到宏景智驾CEO刘飞龙,似乎更乐观了,对今年落地的预期也好过去年不少。
稍显局促的采访间,并不影响他对行业的判断。按计划,宏景智驾在2025年,要达到百万台套以上的销售能力,并实现全栈的高等级自动驾驶产品线布局。
“在上汽、长城、奇瑞、江淮、比亚迪等车企,共计30 个车型实现了量产和定点。”上海车展现场,他透露公司相关产品累计量产出货,超过35万套。
宏景智驾是一家 L4自动驾驶起家的公司,在L4降维L2的背景下,宏景智驾很快转移到L2/L2+的ADAS量产路径。公司用三年时间,实现了第一个量产项目的落地,2021营收超过2亿元。
这次上海车展,宏景智驾发布了三款产品,分别是基于BEV新一代感知技术的高阶智驾系统方案、高性价比的单征程3行泊一体域控制器以及单征程 3 智能摄像头模组两款新产品。
“仰望星空,脚踏实地。”这是发布会出现频率很高的8个字,这主要在于宏景智驾一直在推进L4 自动驾驶技术的研发,同时也在满足车厂对高性价比、量产落地的追求,将高阶自动驾驶技术降维应用到量产产品线上。
车展发布的这3款产品,就是宏景智驾对L2和L4全栈能力的最新布局。
L2+产品可标配20万以内的车型
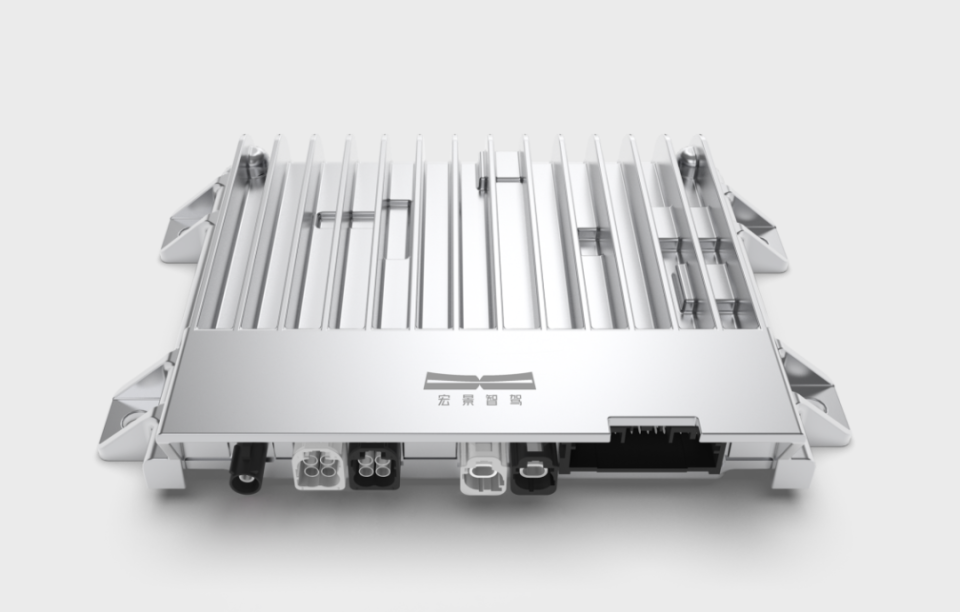
先来看一下轻量版行泊一体方案:
单征程3行泊一体解决方案,搭载宏景智驾最新研发的行泊一体高度集成的先进域控制器架构,同时配备了5R5V12Uss的外接传感器组合,前视采用了800万像素摄像头,支持高性能辅助驾驶功能。

算力仅有5Tops,是市面上搭载最小算力的方案之一。
单颗 SoC 支持行车、泊车双场景,算法分时复用,经过极致的稀疏化和裁剪,可以在低算力平台上运行。
在行车场景中,使用该域控制器,采用 5R5V 传感器配置,可实现高速导航辅助驾驶系统(高速NOA),在多种 ADAS 主动安全及舒适辅助驾驶类功能方面表现也不错。
在泊车方面,车辆配合上宏景智驾全新一代泊车 2.0 软件算法架构,若是遇到一些高难度极限泊车场景,比如遇到狭小车位,该款域控制器可支持实现自动辅助泊车、遥控泊车等泊车功能。
同时该方案支持全生命周期升级进化,在未来的不断升级中,还可以支持升级至记忆泊车(HPP)。
此外,作为行业唯一双版本 MCU 的单征程 3 域控制器方案,支持英飞凌和芯驰两套方案,也将供应链风险降至最低。
在法规标准方面,该域控制器的目前已全面支持欧洲法规,能够快速适配全球市场平台化车型开发。
高性价比是这套方案的一大亮点,据介绍,可以标配20万以内的车型。
此外,宏景智驾还发布全新基于单颗征程 3 打造的智能摄像头产品,基于该产品,宏景智驾已自研感知算法,解决多项挑战性的法规测试场景包括行人横穿和转弯防护,其中的 AEB 功能达到 C-NCAP 2024 和 E-NCAP 2025 五星水平。
具体到功能上,基于该智能摄像头产品的智能驾驶系统,性能和体验进一步提升,可实现的功能上探至「拨杆自动变道」。
根据宏景智驾的规划,这款产品计划在 2023 年内实现量产装车,目前已经与国内主流造车新势力达成量产合作。
高阶智能化也来了
性价比有了,高阶智能化也要打上去。
此次车展,宏景智驾发布基于行业前沿的BEV视觉技术的高阶智能驾驶系统方案。这套方案基于国际一流大算力 SoC 芯片打造,匹配更先进算法和前瞻技术方案,旨在能打造出更加安全、舒适的高阶智能驾驶。
作为下一代旗舰平台,宏景这次车展发布的方案采用更强算力的单 SoC 域控制器,算力灵活可配置,最高算力可达 500TOPs 以及 250K DMIPs,基于7nm制程让其拥有更优的功耗和散热表现,以及更具竞争力的成本优势。除传统传感器之外,这套方案还支持 部署4D 成像雷达。
在全新硬件计算平台基础上,宏景智驾也为其匹配了更加先进的软件算法,包括高精度主动传感器感知算法、基于BEV Fusion(时序融合)可实现更精准的环境感知以及实时 SLAM 算法结合轻量化地图可替代 RTK 和高精地图。
这套高阶智能驾驶系统方案,可以解决高速场景下的不少难题,包括静止异形物、交通锥、事故/施工区域等场景的应对能力,而且其行车泊车场景功能增加,可运行区域范围扩大,大幅减少了驾驶员干预。
此外,车展期间,宏景智驾还宣布与马瑞利(MARELLI)达成合作,共同推出创新智能化车灯产品。

马瑞利致力于在车灯结构引进智能化,本次合作也可以说是业内首次将车灯系统与智能驾驶系统融合。
在马瑞利全新发布的SmartCorner™智能车灯产品中,宏景智驾为其提供行人感知、确定目标方位等算法,将摄像头或激光雷达与车辆大灯集成为一体式系统,通过传感器感知行人,并通过大灯发出灯语。
比如,系统在探测到行人后,可将特定灯语投射到行人脚下,行人移动时,系统灯语可追踪行人位置,与行人展开互动。
不仅驾驶员能够感知到行人,车辆通过灯语还可告知行人已经被探测到,行人便可根据灯语提示(左转、右转、停车等)与自动驾驶状态下的车辆展开交互,这样也大大降低自动驾驶车辆阻碍交通的概率。